[paper review] EgoVLA: Learning Vision-Language-Action Models from Egocentric Human Videos part1. (feat. OpenVLA)
현재 시각 22:50, 저는 학교 연구실에서 VLA 논문을 정독하고 있습니다. 어쩌다 읽게 되었나?! 계절학기 연구수업에서 준 논문입니다. 왜 그 수업을 들었나?! 멀티모달리티에 DEEPDIVE를 하고 싶었기 때문입니다. 모레 크리스마스에 수영장 가기 앞서 예습할 겸 VLA에 다이빙해보려 합니다.
EgoVLA의 ego는 데이터셋의 Egocentric한 특징에서 유래했습니다. Egocentric (형) 자기중심적인. 1인칭 시점에서 촬영된 영상 데이터셋을 활용한 부분과 관련이 있는 거 같습니다. 본 논문은 로봇이 실제로 등장하는 데이터의 확보가 어렵다는 문제를 ‘실제 인간의 영상 데이터’를 활용하는 방법으로 풀고자 했습니다.
오늘은 논문 목차 중
- Introduction
- Related Work
- Learning Manipulation Skills from Ego-centric Human Videos
세 파트 그리고 관련 레퍼런스를 간략히 톺아보겠습니다.
먼저 전체 EgoVLA 파이프라인에 대한 한 줄 요약!
VILA는 NVIDIA에서 만든 범용 비전-언어 모델인데, 이 VILA 계열 모델(NVILA-2B)을 backbone VLM으로 써서 그 위에 action head만 얹어 VLA로 확장한 것
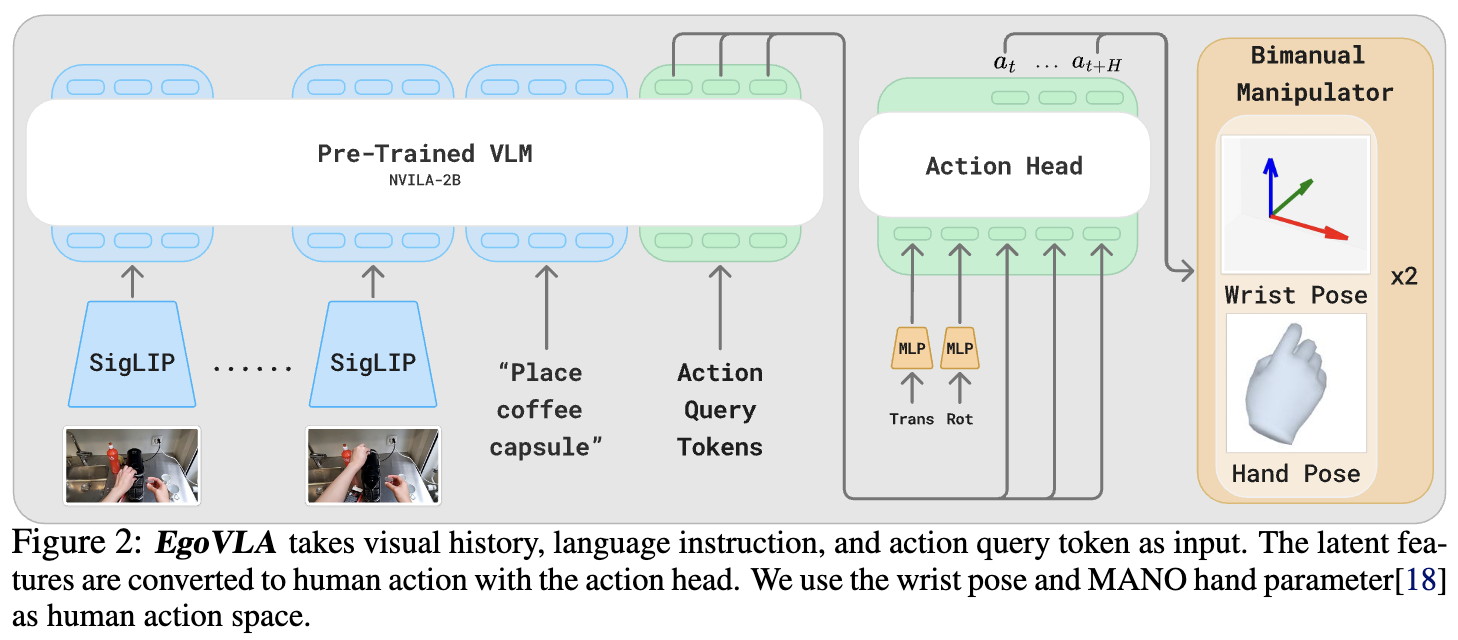
3장에서는 EgoVLA의 자세한 구조를 이야기합니다. Fig2의 EgoVLA는 크게 두 부품으로 구성되는데, 먼저 좌측에 세 모달리티 입력을 처리하는 VLM 백본이 보입니다. 최근 OpenVLA 연구에서 SigLIP과 DINOv2를 혼합하여 사용하는 것이 로봇 조작 성능을 가장 높인다는 결과에 영감을 받은 구조가 아닌가 싶습니다.
VLM에 들어가는 입력을 구체적으로 알아보겠습니다. 우리 EgoVLA 모델은 자연어의 명령문을 듣고 이를 수행하기 위한 동작을 취하고 싶습니다. 그러기 위해선 “커피 캡슐을 내려놓아”라는 language instruction과 커피캡슐 위치를 파악할 수 있는 visual observation이 필요합니다.
Fig2의 또 다른 입력 Action Query Token이 의아할 수도 있습니다. 저는 ‘어떻게 벌써 action 정보를 넣어주지?’라는 생각에 직관과 동떨어진 느낌을 받았는데 저만 그랬던 걸까요?^^ 이처럼 Pre-trained VLM은 vision, language, action 세 모달리티에 대응하는 정보들을 입력으로 받게 됩니다.
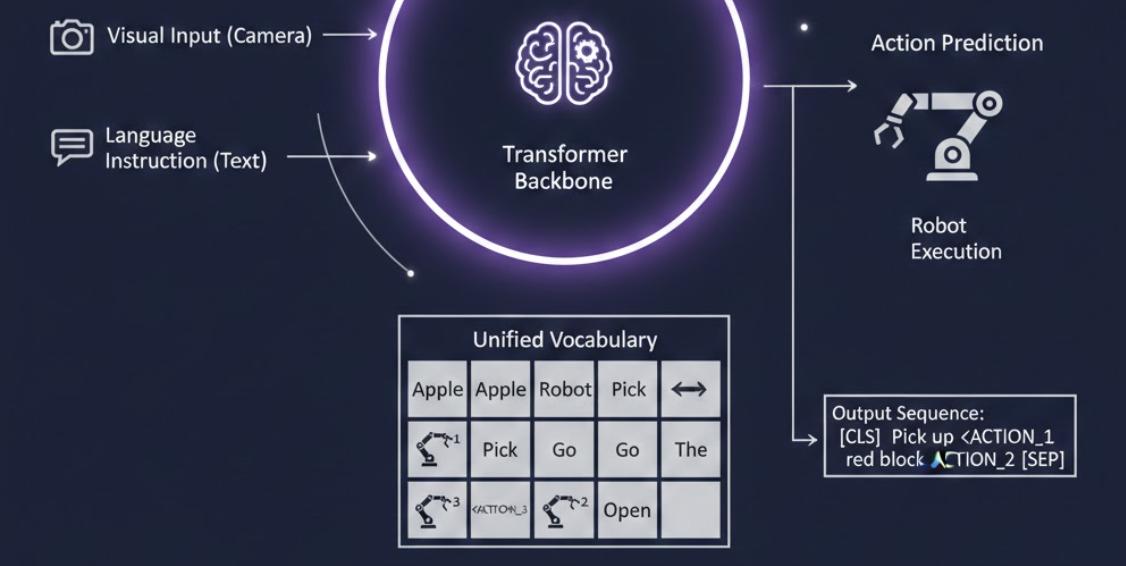
Action Query Token의 정체를 알기 전에 VLA 모델에서 action 정보가 어떻게 처리되는지 알면 좋습니다. VLA는 자연어와 모션 두 모달리티를 같은 임베딩 공간에 두려고 합니다. 흔히 말뭉치 집합 corpus나 단어장 dictionary에 action 정보가 삐집고 들어간 모습을 상상해보면 됩니다. 극 대본에 비유해볼 수도 있습니다. 대본은 대사와 행동 지침이 한 줄에 모두 적혀 있죠. 이로써 VLA는 다음에 올 단어를 확률적으로 고르듯이 단어와 모션을 고르면 됩니다. 예를 들어 자연어 ‘오른쪽’ ‘왼쪽’ 등 방향을 나타내는 자연어 근방에 모션 정보가 올 확률이 높겠죠?
다시 action query token으로 넘어오자면 action query token은 비전+이미지 정보 뒤에 빼꼼 붙습니다. 하지만 빈 상태로 붙어 VLM이 알아서 context에 맞게 채워주기를 기다립니다. 이렇게 채워진 action token은 아직은 로봇이 알아듣지 못하는, latent space에 있다고 할 수 있습니다. 그러나 시각/의미/동작 삼쌍 정보가 압축적으로 들어가 있습니다.
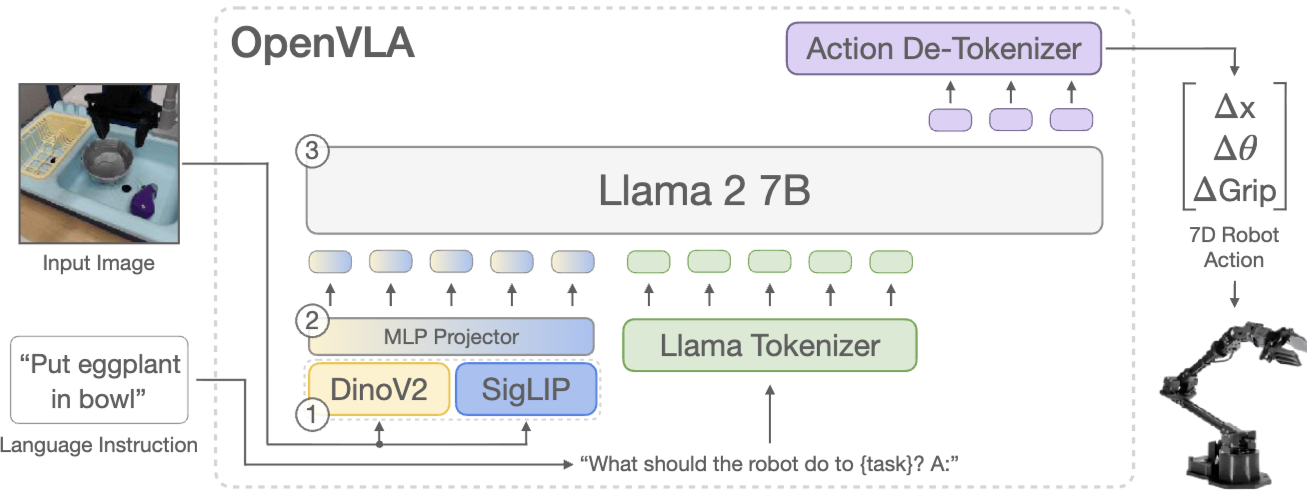
vision, language, aciton 세 모달리티를 하나의 모델로 합친 것으로 유명한 OpenVLA: An Open-Source Vision-Language-Action Model (2024) 논문에서 비슷한 구조를 확인할 수 있습니다. OpenVLA는 Llama 2와 같은 언어 모델의 단어장 중 사용되지 않는 256개의 토큰을 액션 토큰 자리로 예약해 둡니다. 그리고 모델이 다음 단어를 예측할 때, 텍스트 대신 이 액션 토큰을 생성합니다. 예를 들어, 로봇 관절의 수치(0∼255)를 각각 하나의 단어처럼 취급하여 문장을 만들듯 동작 시퀀스를 출력합니다. 단어와 액션 모두 시계열 데이터인 점에서 착안해 기존 VLM으로 액션 생성을 꾀했다는 발상이 참 흥미롭습니다.
EgoVLA로 돌아와 두번째 부품, Action Head를 살펴볼 차례입니다. action head는 OpenVLA에 없던 부품으로 한 번에 긴 동작을 예측할 수 있다는 장점이 있습니다. 한 번에 여러 액션 시퀀스를 예측하는 기술인 action chunking을 간단히 짚고 넘어가겠습니다.
1 step 예측 방식의 문제점
- 매 프레임 왼쪽으로 1cm, 오른쪽으로 1cm 식으로 결정하면, 전체적인 동작의 흐름이 끊기고 일관성이 떨어집니다.
- Compounding Error : 한 번의 미세한 실수가 다음 동작의 예측 오류로 이어져 결국 작업을 실패하게 만드는 문제가 발생합니다.
AC 동작 과정
- 모델은 현재 시점 $t$에서 하나의 동작 $a_t$만 내놓는 것이 아니라, 미래 $H$ 스텝(예: $a_t, a_{t+1}, \dots, a_{t+H}$)의 동작 시퀀스를 한꺼번에 예측합니다.
- Temporal Ensembling : 시점 $t$에서 예측한 $H$개의 동작과, 시점 $t+1$에서 예측한 $H$개의 동작이 서로 겹칠 수 있는데, 겹치는 부분들을 가중 평균(Weighted Average)하면 로봇의 움직임이 부드러워집니다.
AC의 장점
- 물리적으로 자연스러운 궤적을 형성하는데 도움이 됩니다.
- ‘커피 캡슐 넣기’와 같이 여러 단계가 연결된 작업을 하나의 의도로 묶어서 수행할 수 있습니다.
- 모델의 추론 속도가 조금 느리더라도(예: 5Hz), 한 번에 예측한 동작 뭉치를 빠르게(예: 30Hz) 실행함으로써 실시간 제어를 구현할 수 있다고 합니다.
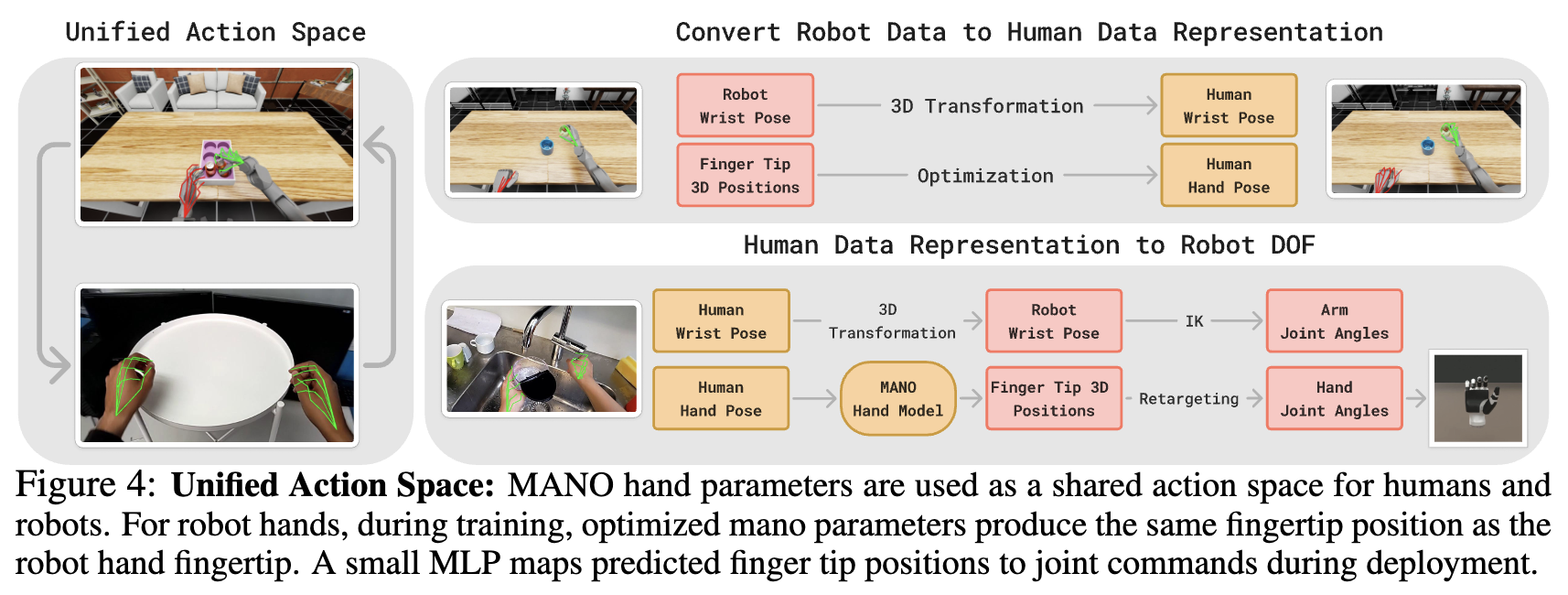
action head는 VLM이 출력한 action token을 입력으로 받아 MANO 파라미터 추출에 앞서 H 스텝만큼의 미래 액션 토큰을 예측합니다. 이러한 일련의 액션 토큰은 shared action space를 구성하는 3차원 손목 좌표, MANO 파라미터로 변환됩니다.